“Con lắc lò xo” là chương trình máy tính mô phỏng dao động của một vật gắn trên lò xo, một trường hợp điển hình của dao động tử điều hoà. Chương trình diễn tả lần lượt về dao động điều hoà không ma sát, dao động dưới tác dụng của ma sát nhớt, dao động dưới tác dụng của ma sát khô. Các tham số của hệ dao động bao gồm: ly độ, vận tốc, gia tốc, lực, thế năng, động năng, năng lượng toàn phần được thể hiện trực tiếp qua vector và đồ thị.
Lưu ý: chương trình chạy trên nền java
Video minh hoạ
Hoạt động của con lắc lò xo ảo
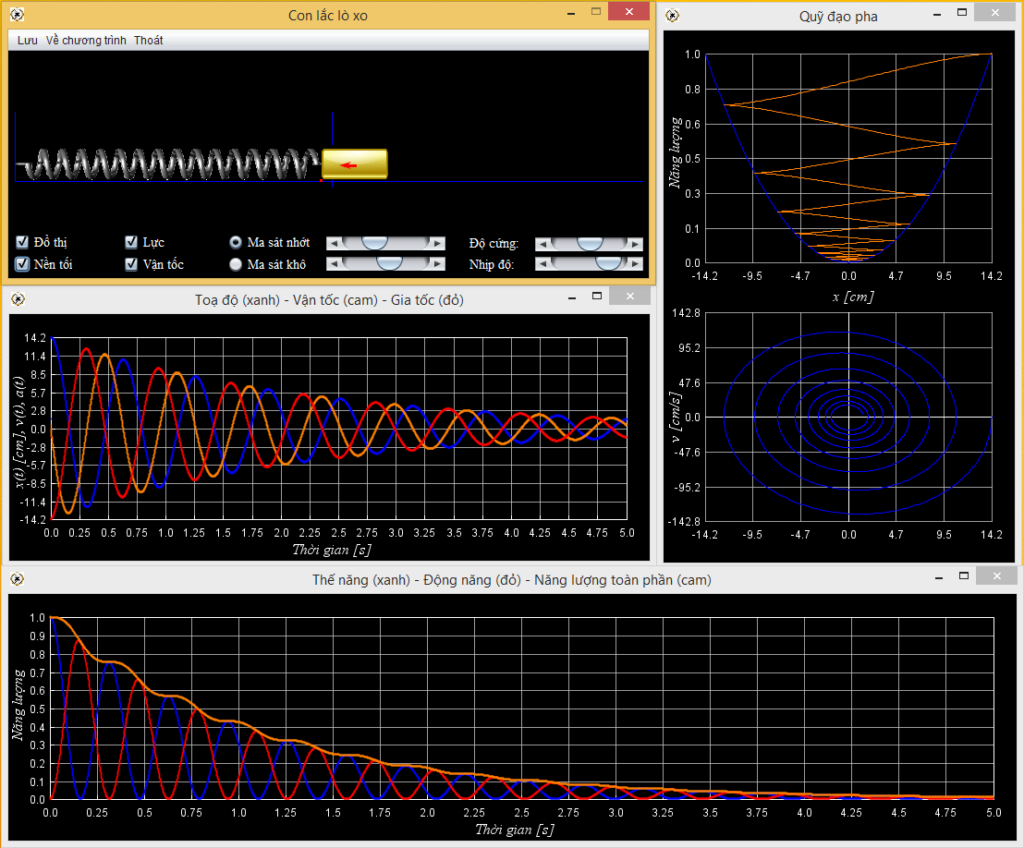
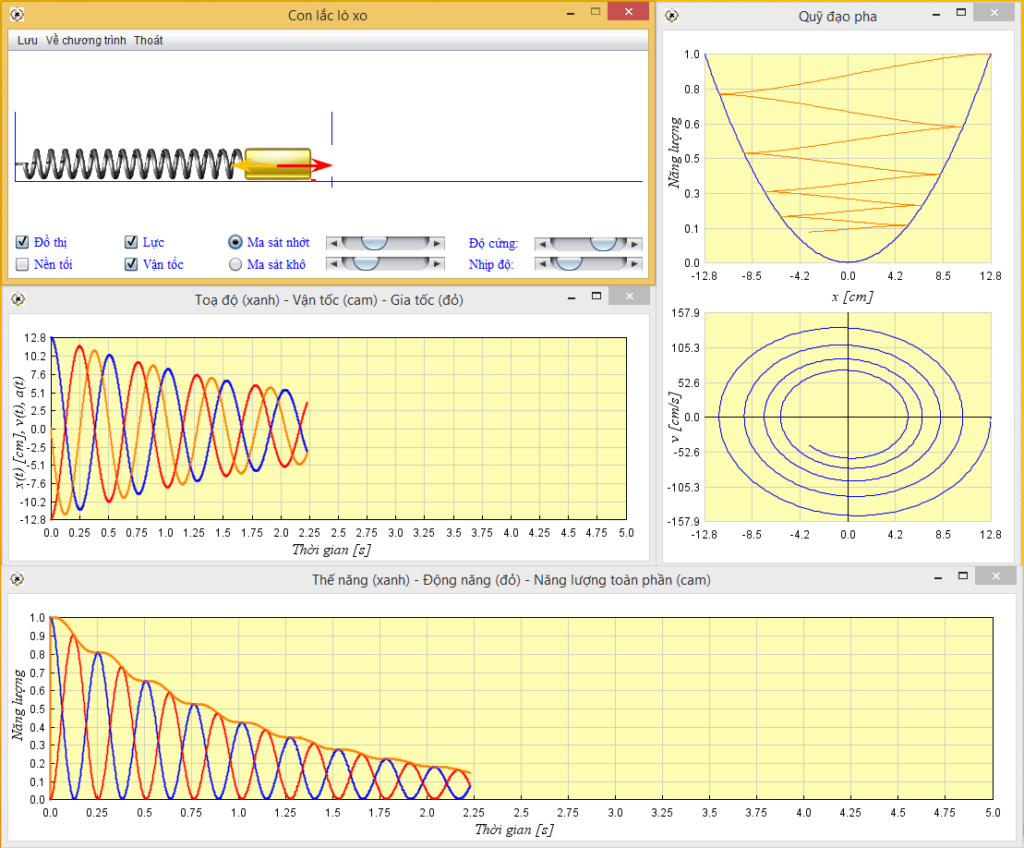
Hệ gồm vật gắn liền với lò xo có khả năng chuyển động theo phương ngang. Giao diện tổng quan khi chương trình hoạt động:
Trên bảng điều khiển thí nghiệm, ta có thể dùng chuột như một bàn tay kéo thả vật:
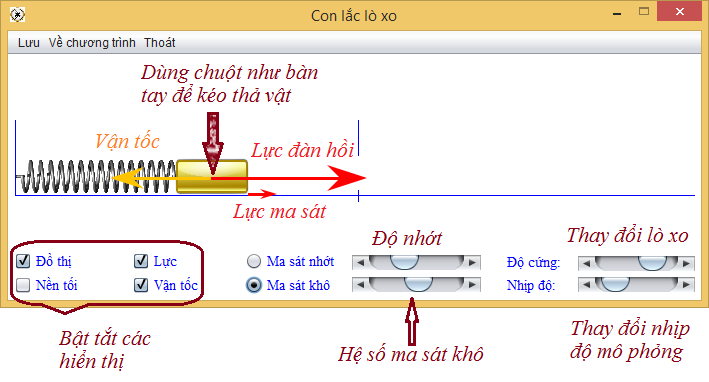
Theo đó ta có thể thay đổi hệ số đàn hồi (hay còn gọi độ cứng) của lò xo, chọn một trong hai loại hình ma sát phổ biến: ma sát nhớt và ma sát khô. Các thanh trượt bên cạnh cho phép tăng giảm độ ma sát. Khi cho hệ số ma sát tiến về 0, ta cũng có được trường hợp dao động điều hoà không ma sát.
Nhịp độ mô phỏng có thể thay đổi. Nhịp độ nhanh sẽ khiến hình ảnh dao động càng giống với thực tế. Nhịp độ chậm sẽ giúp giáo viên cùng học sinh quan sát được kĩ quá trình hoán đổi pha giữa các đại lượng.
Song song với quá trình dao động của con lắc, giá trị của ly độ \(x(t)\), vận tốc \(v(t)\) và gia tốc \(a(t)\) được hiển thị sinh động theo thời gian:
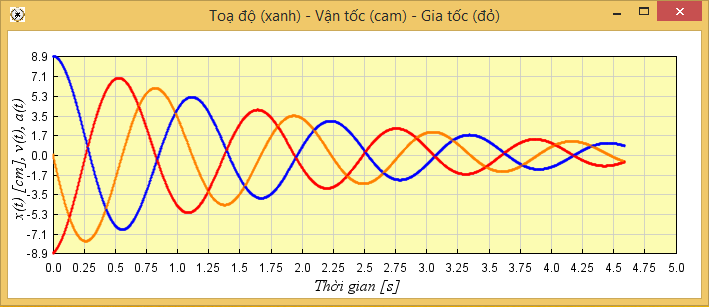
Quy luật biến đổi của gia tốc \(a(t)\) cũng xem như quy luật biến đổi của lực tác dụng lên vật, bởi vì lực và gia tốc tỉ lệ với nhau qua định luật Newton thứ hai:
\[\vec{F}=m\vec{a}.\]
Lực \(\vec{F}\) tác dụng lên vật theo phương ngang là tổng hợp từ lực đàn hồi bởi lò xo và lực ma sát với sàn. Lực đàn hồi mô phỏng theo định luật Hook:
\[\vec{F_{dh}}=-k\vec{x}.\]
Trong trường hợp ma sát nhớt, lực ma sát tỉ lệ thuận với độ lớn vận tốc và luôn ngược chiều với vận tốc:
\[\vec{F_{ms}}=-2\beta\vec{v}.\]
Với trường hợp ma sát khô, lực ma sát nghỉ bằng với lực kéo, còn lực ma sát trượt bằng lực ma sát nghỉ cực đại:
\[F_{ms}=-\mu mg.\]
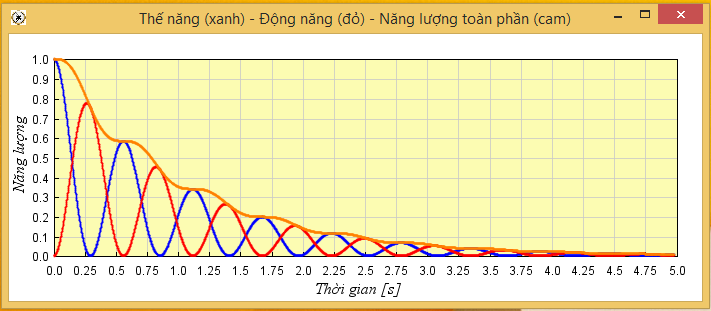
Diễn biến của năng lượng theo thời gian cũng được tường thuật chi tiết. Sự hoán đổi lẫn nhau không ngừng giữa thế năng và động năng làm nên bức tranh tổng thể của năng lượng toàn phần:
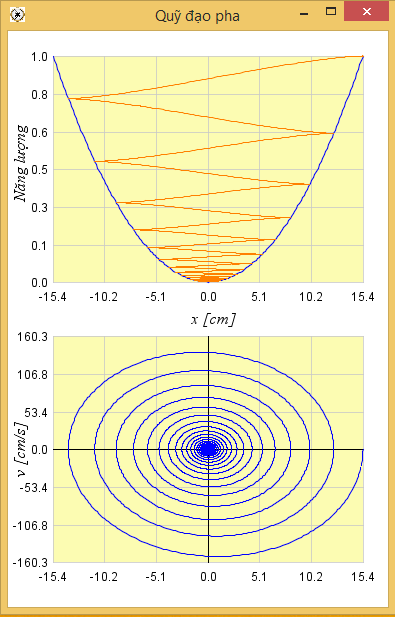
Năng lượng toàn phần còn được biểu diễn dưới dạng dao động quanh hố thế. Đồ thị tương ứng phía dưới diễn tả quá trình dao động trên mặt phẳng \(v(x)\), hay còn gọi là quỹ đạo pha. Hố thế làm nên dao động của con lắc lò xo có dạng một parabol. Cho nên khi không có ma sát, quỹ đạo pha sẽ có dạng elip, tương ứng cho dao động điều hoà hình sin. Khi có ma sát, năng lượng toàn phần bị tiêu hao theo thời gian, ly độ và vận tốc tiến dần về 0, vật tiến dần về vị trí cân bằng ở đáy hố.
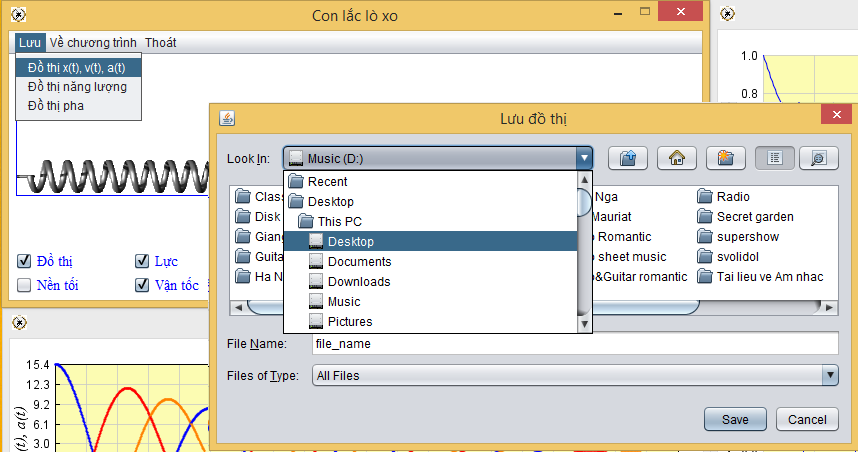
Khi muốn lưu lại kết quả, ta có thể chọn “Lưu – Đồ thị…”. Hình ảnh mặc định lưu dưới định dạng .png:
Chương trình tổng thể ở chế độ nền tối: